GeoSLAM Connect

- カテゴリ
- 3Dマッピング
- 業界
- 土木 測量 防災
- メーカー
- GeoSLAM
GeoSLAM CONNECTを使用して、クリーンで地理参照された点群を自動的に作成します
データの3D視覚化、追加の処理とフィルタリング、ワークフロー自動化ツール、サードパーティソフトウェアアプリケーションへの統合に加えて、世界をリードするSLAMアルゴリズムを搭載しています。
ボタンを1つ押すだけで、データが自動的に処理され、選択したフォルダーに保存され、ワークフローの次のステップに備えます。
特長
GeoSLAM CONNECTで得られるもの



SLAM環境プリセット
UAV、屋外、屋内、線形、車両などの一般的なデータキャプチャシナリオは、CONNECTで特徴付けられ、各環境のデータ処理プリセットが定義されています。
これらはデータ処理段階の最初に選択できるため、このプロセスを大幅に簡素化できます。

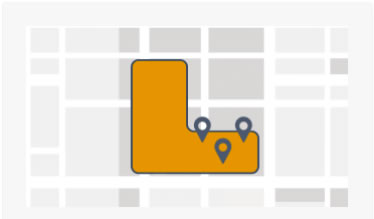
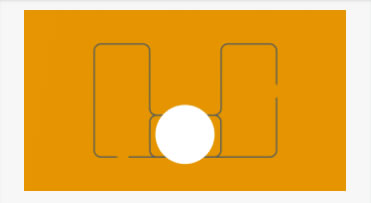
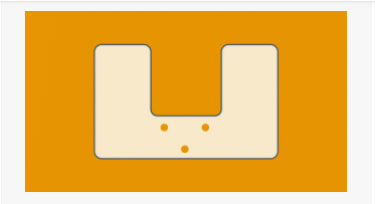
ジオリファレンスを停止して実行
既知のコントロールポイントはスキャン中にキャプチャされ、CONNECTの処理段階で関連する座標と自動的に比較および照合されます。
データセットに対して厳密および/または非厳密な調整を行うことができ、変換がどれほど成功したかを強調する精度レポートがエクスポートされます。
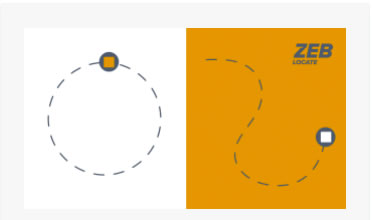
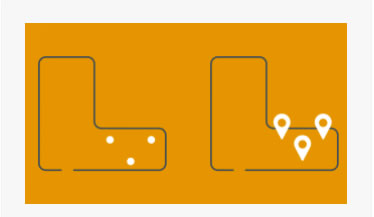
閉ループおよび開ループのジオリファレンス
どちらの方法も、ZEB-LOCATEシステムからのスキャンデータをアンテナから収集されたGPSデータと照合して、点群を地理参照します。
スキャンが同じ場所で開始および終了する場合、これは「閉ループ」として分類されます。
「開ループ」とは、スキャンの開始位置と終了位置が異なる場所にある場合です。
標準のSLAMプラクティスは、データ収集の両方の方法に適用されます。
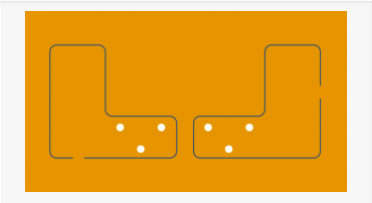
調整を停止して実行
共通の静的ポイントは、いくつかのスキャン中にキャプチャされます。
これは、これらのデータセットを自動的に位置合わせできることを意味します。
次に、データが1回のスキャンでキャプチャされたかのように、単一の点群がエクスポートされます。





