現場で使えるモバイル3Dスキャニングアプリ
- カテゴリ
- 3Dマッピング
- 業界
- 土木 測量 防災
- メーカー
- PIX4D
地上データを取得

対象エリアを歩き回ると、PIX4Dcatchは自動的に動画から位置情報とオリエンテーションを含む動画フレームを記録します。
進捗を管理

ARによって、動画のフレームにオーバーレイされる3Dメッシュでスキャンの進捗と被覆状況のライブフィードバックを得られます。
一時停止、再開

録画はいつでも一時停止が可能。
ARフィードバックは端末の画面に残り、どの部分が既にカバーされたのかを表示します。
完了

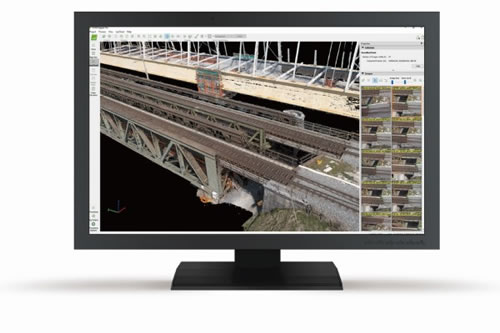
取得した画像をPIX4Dcloudへアップロード、もしくはPIX4Dmapperにエクスポートし、精確で簡単に共有ができる3Dモデルと点群を作成します。
その上で、距離、面積と体積を計算し、バーチャル点検を行うことができます。
今日から無料でPIX4Dcatchを試してみましょう ⇒ 
どこでも、ポケットから出せる3D
簡単なデータ取得
1タップで簡単に、地上3Dモデルのために必要なデータが取得可能
スキャンの進捗状況がリアルタイム3Dメッシュ化によるフィードバックで把握可能
高速・高信頼性
現在位置の保存
スケーリングされたジオリファレンス付き3D出力を生成
完全で正確な3Dモデル
Pix4D製品ですべてを実現
プロジェクトのエクスポート、処理、解析
数多くのPix4D製品から選択
PIX4Dcloudでプロジェクトの共有やボリューム計測が可能
地上画像から3Dモデルを作成しましょう
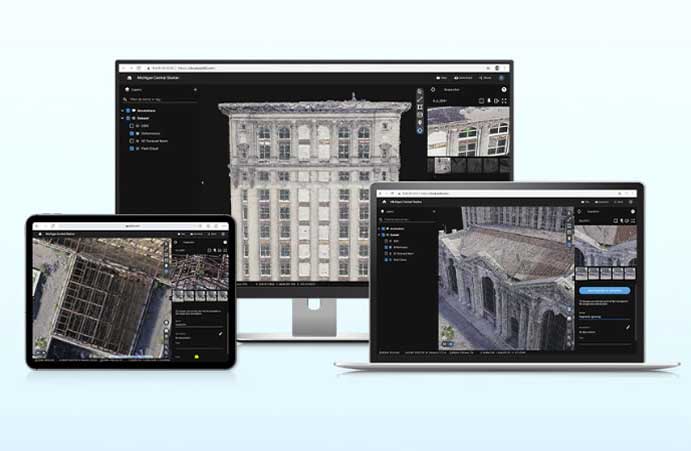
PIX4Dcloudに画像をアップロード
有効な PIX4Dcloud ライセンス*で、画像をアプリからクラウド処理のために自動的にアップロードしましょう。
モデル上でアノテーションを追加、計測し、より簡単に共有しましょう。
*処理する画像の枚数が、クラウド処理容量にカウントされます。

PIX4Dmapperへ画像をエクスポート
有効なPIX4Dmapperのライセンスを用いて、オンラインのファイル保管ソリューションまたはハードドライブを通じて画像をエクスポートします。
地上で取得した画像とドローン空撮の画像を統合し、完全で精密な現場の3D表現を達成しましょう。

対応するデバイス
PIX4DcatchはARでスキャンの進捗状況のフィードバックが得られる、LiDARスキャナーを搭載する iPad Pro に最適化されていますが、バージョン13.4.1以上の他のiOSデバイスでも画像を録画するのに使用できます。

| 撮影 | ||
| 撮影 | 高度なフォトグラメトリ技術がなくても、すぐに撮影を開始で きます。 撮影ボタンを押して、対象エリアを歩くだけで撮影できます。 PIX4Dcatch は、自動的に画像を記録し、撮影された画像が保 存されると点群を生成します。 ライブ プレビューと動的ライブメッシュがガイドとして機能 することで、正確で包括的な撮影が確実にできます。 また、最適な結果を得るために、詳細設定で設定をカスタマ イズできます。 | |
| 撮影画面 | ・画像を自動的に撮影し、正確なジオロケーションと ともに保存 ・撮影の一時停止および再開撮影を保存または中止 ・撮影中のライブ プレビューの表示 ・撮影中のメッシュの表示 ・撮影終了時における品質レポートの作成 | |
| 設定 | ||
| 撮影設定 | ・像の重なりやデバイスの姿勢のカスタマイズ ・警告音メッセージオート フォーカス低品質の画像の スキップ | |
| ビュー | ・撮影中の画像の重なりの表示 ・カメラ ビューの表示 ・特徴点の表示 | |
| メッシュ | ・再構成メッシュの表示 ・メッシュの保存 (OBJ 形式) ・メッシュの種類と色の変更 ・メッシュとカメラ オブジェクトの色の変更 | |
| その他 | ・ビデオの保存 | |
| プロジェクト | ||
| プロジェクト ダッシュボード | キャプチャまたは処理されたすべてのプロジェクトを簡単に 管理できる、ビジュアルインターフェースを実装されています。 RTK、GPS、GCP、MTPなどのさまざまなタグを含むダイナ ミックな3Dビューアでプロジェクトを表示し、各キャプチャ のRTK精度も把握できます。 プロジェクト内にGCPを直接追加することで、絶対精度を高め ることができます。 強力なプロジェクト管理ツールを使用して、必要に応じてプロ ジェクトや画像を検索、フィルタリング、複数選択、変更もで きます。 | |
| ・プロジェクト一覧 ・ステータスでプロジェクトを絞り込む ・プロジェクトの検索 ・複数プロジェクトの選択と削除 ・ドラッグダウンによるプロジェクトパネルの更新 | ||
| プロジェクト ビュー | ||
| 3D ビュー | ・取得した点群の3Dビューを表示 ・RTK、GPS、GCP、MTP用に異なるタグを有効化 ・画像ごとのRTK精度を3つのレベルに分類: ・最適(Optimal)、・中(Reduced)、 • 低(Low) の3つのレベルに分類 ・RTK精度、カメラ、点群、メッシュ、3Dモデルのセ ンタリングを切り替えてビューをカスタマイズ可能 ・テクスチャの計算 ・PIX4Dcloudで処理された点群の3Dビューを表示 | |
| 画像 | ・画像一覧 ・複数画像の選択と削除 | |
| 詳細 | ・作成日 ・画像取得した座標系 ・画像枚数 ・ジオロケーションのソース ・RTK精度信頼度(%) ・平均水平・垂直精度 ・使用ストレージ | |
| オプション | ・プロジェクト名の変更 ・プロジェクトの削除 | |
| プロジェクト | ||
| プロジェクト ツール | ||
| 手動GCPマーキング | ・ポイントコレクションの選択 ・画像にマークを追加 ・マークの保存 | |
| 体積計算 | ・点群の高密度化 ・関心領域に点を描くことによる体積の基準の定義 ・自動体積計算 ・切土・盛土の体積の表示: 数値、形状、精度 ・結果を PDF でエクスポート | 現場で即座に任意の体積を計算し、その値と精度を取得でき ます。 プロジェクトの処理を長時間待つ必要も、体積を後処理で計算 する必要もありません。 この体積計算機能は PIX4Dcatch に直接組み込まれているため、 精度を損なうことなく現場で即座に値を取得できます。 迅速・正確・簡単に使用でき、現場にすぐにフィードバックを 返せるため、追加コストやプロジェクトの遅延を防ぐことがで きます。 |
| 撮影ツール | ||
| ポイントの管理 | プロジェクトのアンカーとして、または単に関心ポイントと して使用するためのポイントを撮影して測定します。 | |
| ・定義された CRS(平面座標および標高)によるポイ ント グループの作成 ・サイト ローカリゼーションのための座標系の作成 ・定義された CRS(平面座標および標高)でのポイン トのインポート ・地図上でのポイントの表示 ・ポイントの名前の変更 | ||
| ポイント測定 | ・GNSS ポールを使用する場合におけるアンテナの高 さの入力 ・参照写真の追加(任意) ・説明の追加(任意) ・測定時間の変更 | |
| タグ検出 | 撮影中に Pix4D オートタグを自動識別することで、GCP ワークフローを効率化し、プロジェクトの絶対精度を向上 させます。 ターゲットを関心ポイントに配置するだけで、オート タイ ポイントの座標を取得し、エクスポート可能なポイント グ ループを生成できます。 | |
| ・オートタグ検出ワークフローを使用してタイ ポイ ントを取得した後の正確な座標の取得 ・ポイント グループをインポートしたのちの、オー トタグ検出ワークフローによるプロジェクトへの GCP の使用 ・撮影後のタグ検出の最適化 | ||
| AR ポイント | AR ポイントを使用して GCP を簡単に見つけられます。 あるいは、撮影時に拡張現実として表示される線(地下設 備、画像の取得ルートなど)の追跡に使用できます。 | |
| ・RTK デバイスに接続した後の拡張現実でのポイント の表示 | ||
| AR 設定 | ・ポイント間のラインのオンまたはオフ ・ポイント ラベルのオンまたはオフ | |
| PIX4DCLOUD AR | 拡張現実(AR)により、撮影後のプロジェクトのビジュア ライゼーションが可能になります。 この機能は、トレンチ検査、設計図と施工後の比較、プロ ジェクトの詳細な記録を行うのに最適です。 | |
| PIX4DCLOUD プロジェクト リスト | ・PIX4Dcloud プロジェクトのリスト ・プロジェクトを種類別にフィルター処理 [サイトま たはデータセット] ・プロジェクトの名前または日付による並べ替え ・プロジェクトの検索 | |
| AR 表示 | ・AR プロジェクトの不透明度をスライダーで調整 ・PIX4Dcloud のレイヤーの表示およびプロパティの 確認 ・PIX4Dcloudレイヤーの表示とプロパティの確認 | |
| RTK 接続 | 任意の RTK デバイスを使用し、RTK 補正を取得して、正 確かつ位置情報が付与されたデータセットを確実に取得 します。 | |
| ・RTK 精度インジケーター(RTK に接続されていない 場合はGPS 強度インジケーターが表示される) ・PIX4Dcatch に対応する RTK デバイスへの接続 (EmlidReach RX、Trimble Catalyst DA2、BadElf、 Leica FLX100、viDoc) ・ケース (SPC または SPC+) を使用しており、正しい ローバー グリップを使用している場合のカメラ オ フセットの設定が簡単 ・手動カメラ オフセット設定 ・NTRIP 認証情報の入力 ・マウント ポイントの選択 ・NTRIP 入力座標系の選択 | ||
| エクスポート | ||
| プロジェクト | PIX4Dmatic で処理するためにすべてのデータをエクス ポートするか、個別の出力のみをエクスポートするか 選択できます。 | |
| ・単一または複数のプロジェクトに対するすべての データ(ZIPファイル)のエクスポート ・GCP のポイントとマークのエクスポート ・撮影した点群のエクスポート (PLY ファイル) ・撮影したメッシュのエクスポート(OBJ ファイル) ・ログのエクスポート | ||
| ポイント | 測定したポイントをエクスポートし、デスクトップに 保存するか、クラウドにアップロードできます。 また、サイト ローカライゼーションの WKT ファイル をエクスポートして保存することで、PIX4Dmatic で カスタム座標系を使用して任意のデータセットを処理 できます。 | |
| ・測定ポイントのエクスポート(ZIP ファイル) ・サイト ローカライゼーションの座標系のエクス ポート(WKTファイル) ・オートタグのタイ ポイント座標とその精度のエ クスポート | ||