
3Dマッピング 【FARO Orbis】車載ユニットで実現!簡易SLAM MMS
概要
FARO Orbis はSLAM LiDAR(LiDAR SLAM、スラムライダー、ライダースラムと表記されることもある)と呼ばれる、外界情報を用いて自己位置を特定し計測を行うLiDAR機器で、GNSSや基準点といった外部情報に頼ることなく三次元計測を行うことができるものです。
そしてMMSとはMobile Mapping Systemの略で、3Dスキャナ・カメラ・GNSSアンテナなどを搭載した車両で道路周辺環境の三次元計測をするものです。
FARO Orbisのオプションユニットラインナップには自動車に設置する「カーマウントキット」が存在しており、これを用いることで手近な車両を簡易的なMMSユニットにすることができます。

機器について
カーマウントキットは基本的に車両の後部に設置し、4つの高性能マグネットで固定されます。その上でケーブルを車両各部に接続し、2重の固定方法で万が一の事故を防止します。 設置作業は数分で行うことができ、取り外しも同様なので専用に車両を用意する必要はありません。またマグネットはゴムで覆われているため、車体に傷がつく心配もありません。

SLAMレーザースキャナの特性上、高速で移動すると点群密度が低下して自己位置推定ができなくなってしまうことがあります。メーカーとしての推奨速度上限は時速40㎞です。
また、それを超えたからと言ってすぐに3次元点群データが取れないということはなく、時速50km程度であっても三次元点群データを得ることができることを確認しています。
計測のスタート/ストップはスマートフォンから行うことができるため、非常に簡単です。
ただし自動車の車体の種類によってはスマートフォンとOrbisの間の無線接続を阻害する可能性がありますので、スタート/ストップ時にはスマートフォンを窓から出すなどの工夫が必要な場合があります。
実際の計測
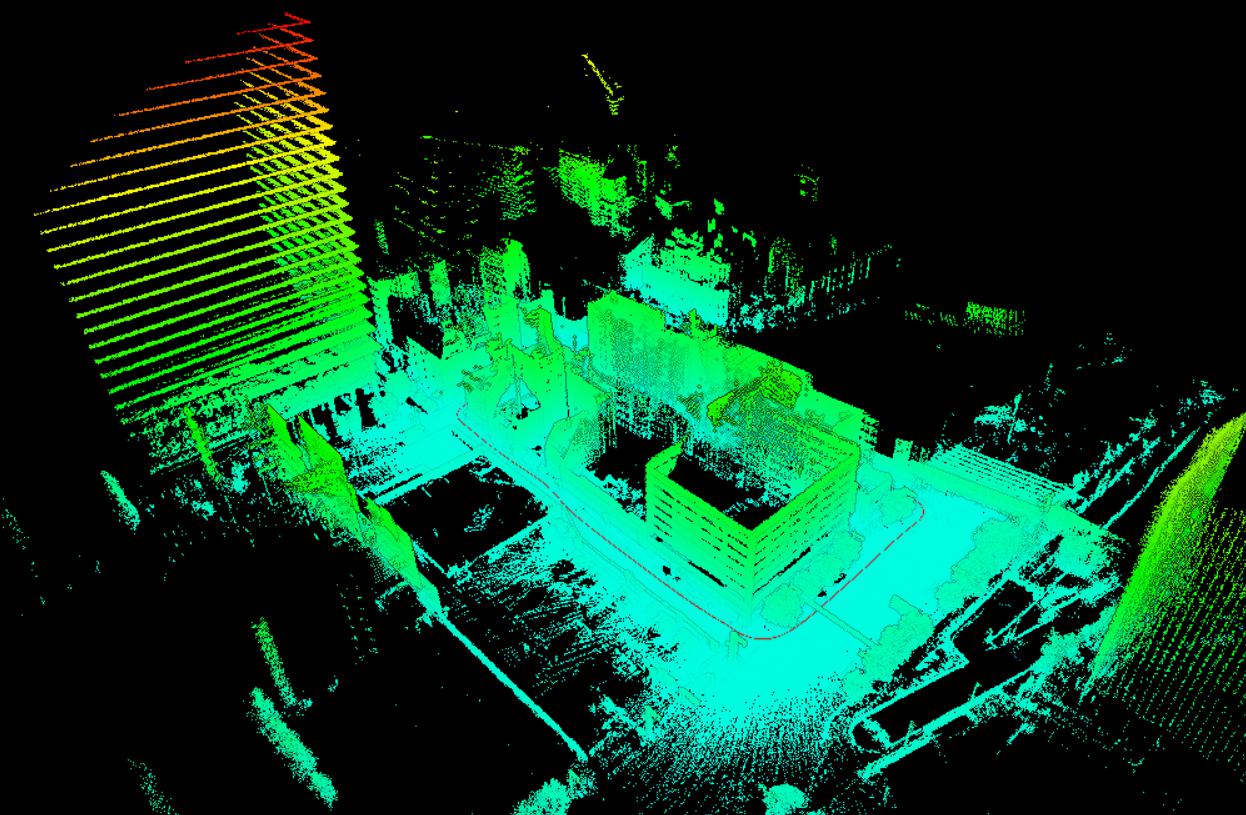
弊社オフィス周辺でのテスト計測データが以下になります。(画像をクリックすると拡大します。)
120m範囲の点群データでは沿道のビルの高いところまで取れています。また、カラー点群化もできていますがやや粗い点群となっております。
高さ色付け(Elevation)の点群データ
カラー点群データ


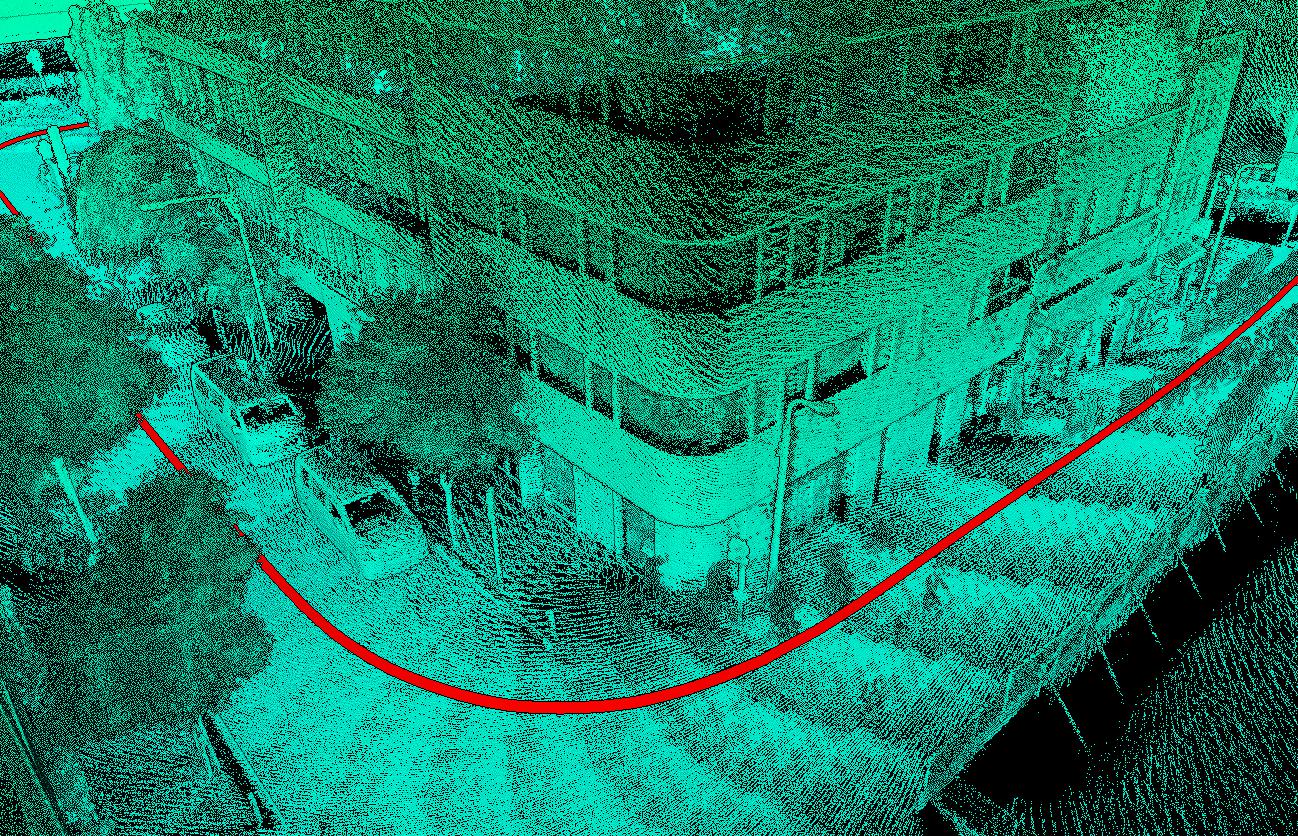
点群を反射強度で白黒2値表示すると路面標示や道路・歩道縁、排水桝、道路標識などの判読が可能です。さらにカラー点群化用の360度カメラ画像も座標付けされて同一プロジェクト内で閲覧できるので、ストリートビューのような成果も得られます。

反射強度(Intensity)の点群データ

360度カメラ画像(薄い白丸は撮影位置)
注意点
以上のデータからわかるように、簡易的なMMSとして十分活用できるものではありますが、やはりあくまでも簡易的なものであることは注意が必要です。 SLAM LiDARの特性上平滑な面が長く続くトンネルのような場所はスラムスリップを起こしてしまう可能性が高く、比較的高速で動く車載での計測は基本的には向きません。
また、国土地理院の『作業既定の準則』ではMMSの定義としてGNSS受信機の設置が含まれているので公共測量での使用は原則できません※。
※17条2項申請を行えば使用可能です。
まとめ
本記事ではSLAM LiDARの実用例を紹介いたしました。今後も実際の計測事例を紹介していきたいと思います。
弊社ではSLAM LiDAR「Orbis」の販売の他に計測作業請負を行っています。道路及びその周辺の三次元化について、ご相談またはご興味がありましたら、お気軽に問い合わせください。
