現場で使えるモバイル3Dスキャニングアプリ
- カテゴリ
- 3Dマッピング
- 業界
- 土木 測量 防災
- メーカー
- PIX4D
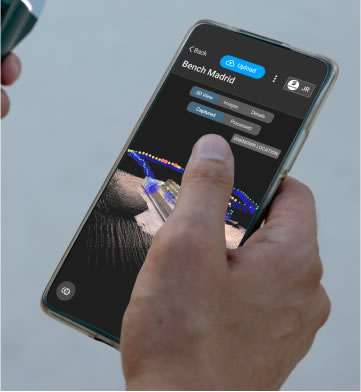
PIX4Dcatchは、スマートフォンやタブレットを使って、誰でも簡単に「プロ仕様の3Dスキャン」ができるモバイルアプリです。
ドローン測量の世界最大手であるスイスのPix4D社が開発しており、単なる3Dスキャンアプリではなく、「測量・建設・調査」の現場で実用できる精度を備えているのが最大の特徴です。
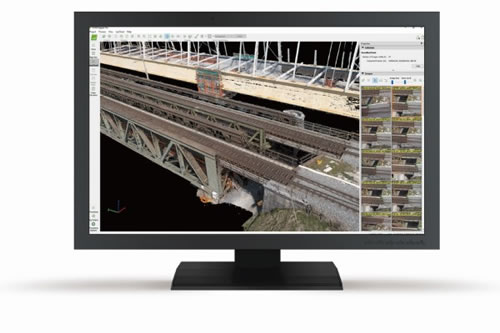
■ ハイブリッド・データキャプチャ(LiDAR × 写真)
デバイスのLiDAR(レーザー)とカメラ(写真測量)の両方のデータを同時
に活用
■ リアルタイム・フィードバック(撮り逃しの防止)
スキャン中、画面上にリアルタイムで3Dメッシュが生成
■ 外部GNSS(RTK)連携による高精度化
Emlid Reach RX などの外部GNSSレシーバーとBluetooth接続することで、
スマートフォンの位置情報をセンチメートル級の精度に補正
■ AR(拡張現実)機能の活用
単に撮るだけでなく、現場でデータを「見る」機能が強力
PIX4Dcatch が選ばれる理由
ジオリファレンスされた3D スキャン
PIX4Dcatch は、フォトグラメトリと LiDAR技術の両方を駆使して、詳細にジオリファレンスされた 3D モデルを作成します。
柔軟な処理オプション
PIX4Dcloud への直接アップロードによる簡単な処理や、PIX4Dmatic による高度な処理など、柔軟な処理オプションが利用可能です。
RTK対応
PIX4Dcatch をRTK とともに使用することで、3Dモデルの絶対精度を実現します。

AR機能
AR機能を使用すると、GCP の簡単な検出や、現場とCAD設計図面の重ね合わせによる分析を行うことができます。

操作性
包括的なサポートを備えた直感的な UI により、すべてのユーザーがすぐに使いこなすことができます。
今日から無料でPIX4Dcatchを試してみましょう ⇒ 
どこでも、ポケットから出せる3D
簡単なデータ取得
1タップで簡単に、地上3Dモデルのために必要なデータが取得可能
スキャンの進捗状況がリアルタイム3Dメッシュ化によるフィードバックで把握可能
高速・高信頼性
現在位置の保存
スケーリングされたジオリファレンス付き3D出力を生成
完全で正確な3Dモデル
Pix4D製品ですべてを実現
プロジェクトのエクスポート、処理、解析
数多くのPix4D製品から選択
PIX4Dcloudでプロジェクトの共有やボリューム計測が可能
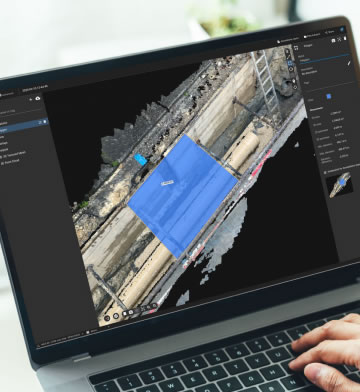
地上画像から3Dモデルを作成しましょう
PIX4Dcloudに画像をアップロード
有効な PIX4Dcloud ライセンス*で、画像をアプリからクラウド処理のために自動的にアップロードしましょう。
モデル上でアノテーションを追加、計測し、より簡単に共有しましょう。
*処理する画像の枚数が、クラウド処理容量にカウントされます。

PIX4Dmapperへ画像をエクスポート
有効なPIX4Dmapperのライセンスを用いて、オンラインのファイル保管ソリューションまたはハードドライブを通じて画像をエクスポートします。
地上で取得した画像とドローン空撮の画像を統合し、完全で精密な現場の3D表現を達成しましょう。

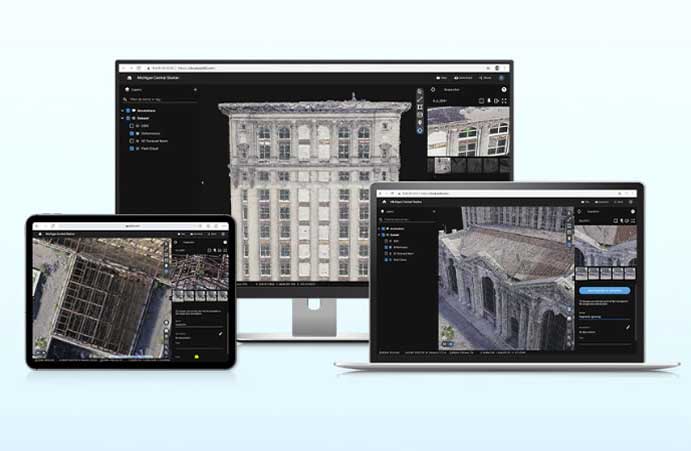
対応するデバイス
PIX4DcatchはARでスキャンの進捗状況のフィードバックが得られる、LiDARスキャナーを搭載する iPad Pro に最適化されていますが、バージョン13.4.1以上の他のiOSデバイスでも画像を録画するのに使用できます。

| CT-NPIX4DCAP-M | プロフェッショナルライセンス(月間):RTK接続、Pix4Dタグによる自動GCP検出、拡張現実機能 |
| CT-NPIX4DCAP-Y | プロフェッショナルライセンス(年間):RTK接続、Pix4Dタグによる自動GCP検出、拡張現実機能 |
| CT-NPIX4DCAP-3Y | プロフェッショナルライセンス(3年間):RTK接続、Pix4Dタグによる自動GCP検出、拡張現実機能 |
| 機能 | 利点 | |||
|---|---|---|---|---|
| キャプチャ | 一般 | 画面保存 | 画像を自動的にキャプチャし、正確な地理位置情報とと もに保存 キャプチャの一時停止と再開 キャプチャを保存または中止 キャプチャ中のライブ表示 キャプチャ中のメッシュ表示 キャプチャ終了時の品質レポート | すぐに撮影を開始できます。高度な写真測量の知識は必要ありま せん。キャプチャボタンを押して関心のあるエリアを歩くだけで す。PIX4Dcatchが自動的に画像を記録し、キャプチャを保存する とポイントクラウドを生成します。ライブプレビューと動的なラ イブメッシュがガイダンスを提供し、網羅的で正確な撮影を確実 に行えるようサポートします。高度な設定で体験をカスタマイズ し、最適な結果を得ることができます。 |
| 設定 | 撮影設定 | 画像の重複度合い、またはデバイスの姿勢を調整警告音 メッセージ オートフォーカス 低品質の画像をスキップ | ||
| 表示 | キャプチャ中に画像のオーバーラップを表示 カメラの映像を表示 特徴的な点を表示 | |||
| メッシュ | 再構築メッシュを表示 メッシュを保存 (OBJ形式) メッシュの種類と色を変更 メッシュとカメラオブジェクトの色を変更 | |||
| その他 | ビデオを保存 一時停止ボタンを削除 | |||
| 撮影ツール | タグ検出 | 自動タグ検出ワークフローでタイポイントを使用し、後 でその正確な座標を取得する。 | 撮影中にPix4D Autotagsを自動的に識別し、GCPワークフローを 効率化し、プロジェクトの絶対精度を向上させる ターゲットを関心のあるポイントに配置するだけで、自動タイポ イントの座標を取得し、エクスポート可能なポイントコレクショ ンを生成 | |
| ARポイント | RTKデバイスを接続して、拡張現実でポイントを表示 | ARポイントでGCPを簡単に見つけたり、撮影中に線に沿って移動 したりする(地下埋設物、画像パスなど) | ||
| AR設定 | 点と点を結ぶ線の表示/非表示を切り替える 点のラベルの表示 | |||
| PIX4Dcloud AR | PIX4Dcloud プロジェクト リスト | PIX4Dcloud プロジェクト一覧 プロジェクトを種類で絞込む [現場またはデータセット] プロジェクトを名前または日付で並べ替える プロジェクトを検索 | 拡張現実(AR)により、撮影後のプロジェクトの可視化が可能に なり、溝の検査、計画と竣工の比較、およびプロジェクトの徹底 的なドキュメント化に最適 | |
| AR表示 | スライダーでARプロジェクトの透明度を調整 PIX4Dcloudレイヤーを表示し、そのプロパティを確認 PIX4DcloudのAutotags付きプロジェクトをARで表示す る(屋内を含む) | |||
| RTK接続 | RTK精度インジケーター(RTKに接続されていない場合 は、GPS強度インジケーターが表示されます) PIX4Dcatch対応のRTKデバイスとの接続 (Emlid Reach RX , Trimble Catalyst DA2, BadElf, Leica FLX100, Topcon HiPer CR, viDoc) SPCまたはSPC+のケースと正しいローバーハンドルを使 用する場合、カメラオフセットを簡単に設定できます。 手動カメラオフセット NTRIP認証情報の入力 マウントポイントの選択 NTRIP入力座標参照系の選択 異なるRTKデバイスとNTRIP設定で、複数のRTKプロ ファイルを作成する。 | お好みのRTKデバイスを使用して、正確な地理位置情報付きのデー タセットを確保するためにRTK補正を取得する。 | ||
| 計画 | プロジェクト ダッシュボード | プロジェクト一覧 ステータスでプロジェクトをフィルタリング プロジェクトを検索 複数のプロジェクトを選択して削除 プロジェクトパネルを下にドラッグして更新 | PIX4Dcloudでキャプチャまたは処理されたすべてのプロジェクト を、視覚的なインターフェースで簡単に管理できます。 | |
| プロジェクト ビュー | 3D表示 | キャプチャされた点群の3Dビューを表示 RTK、GPS、GCP、MTPなどのさまざまなタグを有効化 画像ごとのRTK精度を3段階に分類: •最適、•低下、•低 RTK精度、カメラ、点群、メッシュ、3Dモデルのセンタ リングを切り替えて、ビューをカスタマイズ テクスチャを計算 PIX4Dcloudで処理された点群の3Dビューを表示 高密度点群を生成 | ||
| 画像 | 画像一覧 複数の画像を選択して削除 プロジェクトのテキスト記録 | |||
| 詳細 | 作成日 画像座標参照系 画像数 ジオロケーションソース / 位置情報源 RTK精度信頼度(パーセント) 水平および垂直方向の平均精度 使用ストレージ容量 | |||
| オプション | プロジェクト名を変更 プロジェクトを削除 | |||
| プロジェクト ツール | 手動GCP マーキング | 点群を選択 画像にマークを追加 マークを保存 | ||
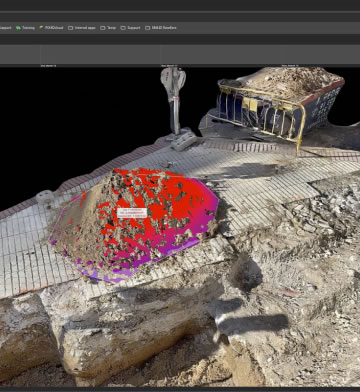
| 体積計算 | 点群の稠密化 関心領域に点を描画して、体積の基準面を定義 自動体積計算 切土と盛土の体積を表示: 値、形状、精度 結果のPDFエクスポート 計算された体積の名前を設定、変更、削除 | 選択した現場の体積を計算し、その値と精度を即座に取得します。 プロジェクトの処理に長い時間を費やす必要も、後処理で体積を計 算する必要もありません。この体積計算はPIX4Dcatchに直接統合さ れており、精度を損なうことなく、現場で直接値を取得できます。 高速、正確、使いやすく、現場で直接フィードバックを提供し、プ ロジェクトの追加コストと遅延を回避できます。 | ||
| 詳細な注釈 | 注釈に名前、説明(オプション)、および/または画像( オプション)を追加 点群をポイントして場所を選択 レイヤー構造を介して注釈を視覚化および編集 キャプチャされたデータセットとともに、PIX4Dcloudに 注釈をアップロード | キャプチャ後、PIX4Dcatchで直接注釈を追加して、現場で保存した い重要な情報でプロジェクトを文書化します。 | ||
| エクスポート | プロジェクト | 単一または複数のプロジェクトのすべてのデータをエク スポート(ZIPファイル) すべてのデータを出力してPIX4Dmaticで処理したり、個 々の出力のみをエクスポートしたりできます GCPのポイントとマークをエクスポート キャプチャされた点群をエクスポート(PLYファイル) キャプチャされたメッシュをエクスポート(OBJファイ ル)ログをエクスポート 高密度点群をエクスポート(GLTFファイル) | すべてのデータを出力してPIX4Dmaticで処理したり、個々の出力の みをエクスポートしたりできます。 | |
| ポイント | 計測点を出力(ZIPファイル) サイトのローカリゼーション座標系を出力(WKTファイ ル) Autotagsタイポイントの座標を精度とともに出力 | 計測点を出力して、デスクトップに保存したり、クラウドにアップ ロードしたりできます。 サイトのローカリゼーションWKTファイルを出力および保存して、 PIX4Dmaticでカスタム座標系を持つデータセットを処理できるよ うにします。 | ||
| PIX4Dcloudに アップロード | 一般 | 1つまたは複数のプロジェクトをアップロード 組織にプロジェクトをアップロード 既存のサイトにプロジェクトをアップロードするか、新 しいサイトを作成 既存のフォルダにプロジェクトをアップロードするか、 新規フォルダを作成 | 簡単・高速・高精度:PIX4Dcatchで取得したデータセットを PIX4Dcloudにアップロードすれば、処理完了後にプロジェクトを 閲覧できます。 特定のニーズや成果物に応じて、処理設定をカスタマイズすること も可能です。 | |
| 処理オプション | ガウシアンスプラッティング手法で処理 対象エリアのDSMモデルを生成 対象エリアのオルソフォトを生成 GCPおよび/またはMTPを使用して処理 出力の座標参照系(投影座標系またはサイトローカライ ズ)を選択し、プロジェクトの位置に基づいてフィルタ リングします | |||
| 調査 | ポイント管理 | 定義された座標参照系(CRS)(平面座標および標高)で ポイントコレクションを作成し、ユーザーの位置に基づ いてCRSをフィルタリング サイトローカリゼーション用の座標参照系を作成 定義されたCRS(平面座標および標高)でポイントをイ ンポート 地図上でポイントを表示 ポイントの名前を変更 | プロジェクトの基準点として、または単に注目点として使用する ために、点をキャプチャして計測できます。 | |
| 測定点 | GNSSポールを使用する際はアンテナ高を入力 参照用写真を追加(任意) 説明を追加(任意) 測定時間を変更 | |||